TP MLI⚓
Introduction
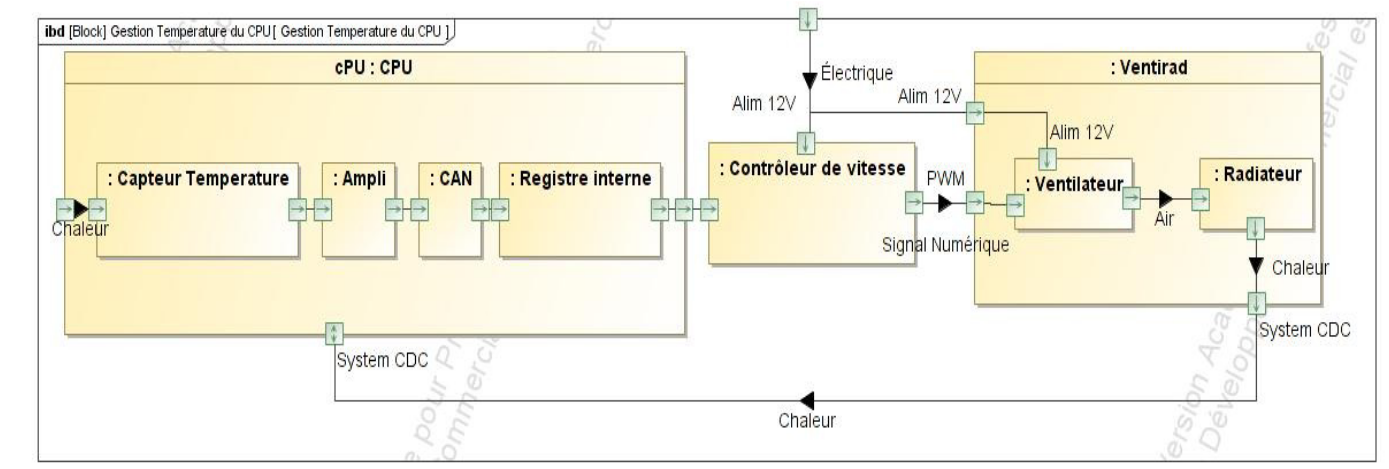
Pour piloter le moteur du ventilateur le CPU envoie une commande au contrôleur de vitesse qui assure l'alimentation électrique : 12 V continu et la variation de la vitesse en agissant sur le rapport cyclique d'un signal carré (PWM : Pulse Width Modulation).
Saisir le schéma suivant sous TinkerCAD :
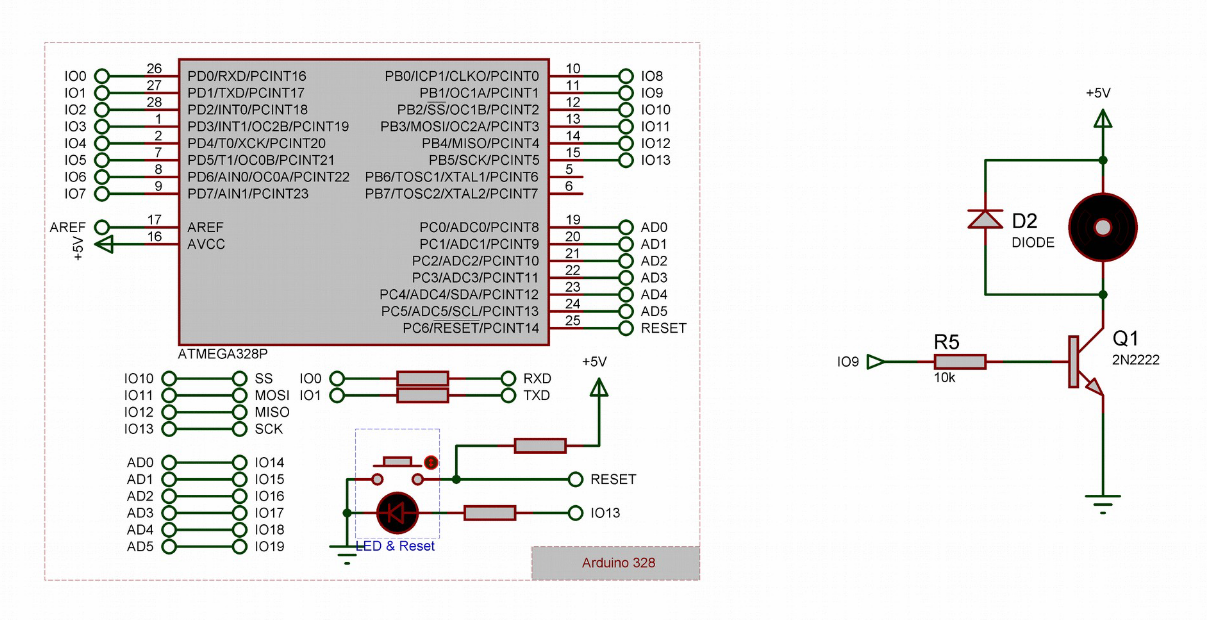
Le moteur est un moteur à courant continu. Il est spécifié pour fonctionner en 5V.
Lire ceci sur les moteur à courant continu
Indiquer sur le schéma la base, l'émetteur et le collecteur du transistor
Le transistor fonctionne en mode « commutation ». Seulement 2 états possibles :
T est saturé pour V_IO9 = 5V (tension de la broche IO9) :
Le transistor est assimilable à un circuit fermé entre le collecteur et l'émetteur Vce = 0,2 V
Vbe = 0,6 V
T est bloqué pour V_IO9 = 0V (tension de la broche IO9) :
Le Le transistor est assimilable à un circuit ouvert entre le collecteur et l'émetteur
Tracer ci-dessous le schéma structurel équivalent dans les 2 cas suivants :
T est saturé

T est bloqué
Programmer le microcontrôleur pour les deux cas de figure IO9 est à l'état haut (V_IO9 = 5V) et IO9 à l'état bas (V_IO9 = 0V) et mesurer les tensions suivantes :
IO9= HIGH | IO9 = LOW |
Vce = | Vce = |
Vbe = | Vbe = |
V_IO9 = | V_IO9 = |
Le transistor est _________________________ | Le transistor est_________________________ |
Quel est le rôle de la diode de roue libre D2 ?
Complément : Valeur moyenne d'un signal carré
Pour calculer la valeur moyenne d'un signal carré, on doit calculer l'aire Ap du « rectangle » représentant la partie positive du signal et l'aire An représentant la partie négative du signal comme indiquer sur la figure ci-dessous :
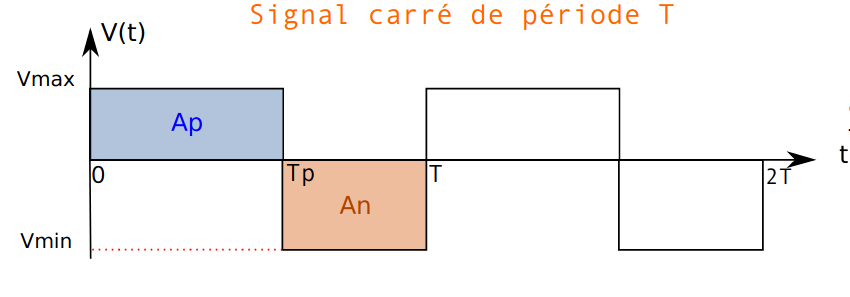
La valeur moyenne <V> de la tension V vaut :
\(<V> = (Ap +An) / T\)
rapport cyclique (Duty cycle):
On note le rapport cyclique α
comme étant le rapport entre la période
Tp et la période T :
\(\alpha = \frac{T_p}{T}\)
Dans le cas des signaux où Vmin vaux 0, la tension moyenne s'écrit :
\(<V> = \alpha V_{max}\)
Faire varier la vitesse d'un moteur avec du 0-5V ?
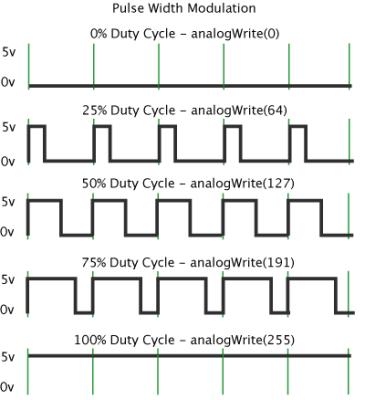
Nous avons vu que la valeur de la tension aux bornes du moteur agit sur sa vitesse. La carte arduino UNO comme beaucoup de carte microcontrôleur ne possède que des sorties numériques : soit 0 V ou 5V, pas de valeurs intermédiaires. La carte arduino est capable cependant de générer des signaux carrés dont la largeur d'impulsion est modulée (MLI ou PWM : Pulse Width Modulation).
Visionner la vidéo sur la PWM :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
La fonction AnalogWrite(pin, r) de Arduino permet de générer des signaux en PWM avec pin le N° de la broche et r doit être compris entre 0 (signal à 0V) et 255 (signal toujours à 5V) :
Modifier le code du projet sous TinkerCAD afin de générer des signaux en PWM pour contrôler la vitesse du moteur.
Ajouter un oscilloscope pour observer le signal de la broche IO9.

Pour différentes valeurs de PWM compléter le tableau :
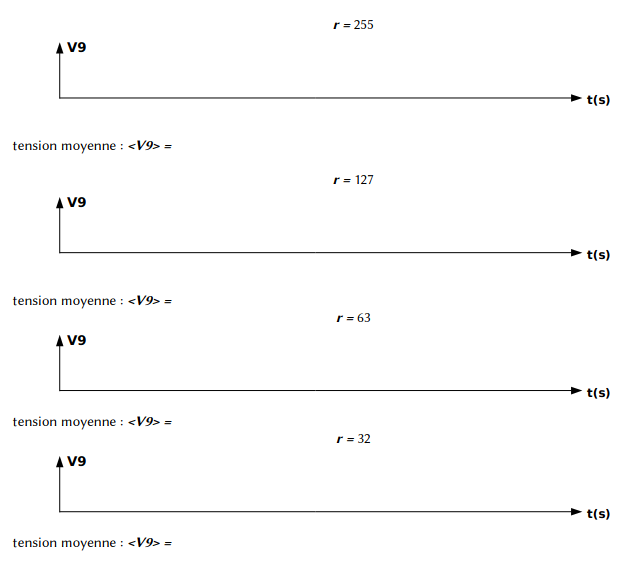
Pour 4 valeurs de r reproduire ci-dessous le signal capté par l'oscilloscope et calculer sa valeur moyenne <V9> :
r | 0 | 32 | 64 | 128 | 255 |
Tension moyenne (V) | |||||
Vitesse du moteur |
Réel
A l'aide du matériel à disposition réaliser ce montage
Brancher un oscilloscope sur VIO9
Programmer la carte afin de générer des signaux en PWM pour les même valeur de rapport cyclique de la simulation et comparer avec la simulation.