Réguler la vitesse du MiniQ 2WD PART I⚓
Comment réguler la vitesse du robot ?
Deux paramètres de la fonction Motor_Control permettent de faire varier la vitesse des roues. On a vu qu'il était assez difficile d'obtenir une vitesse identique pour les deux moteurs avec une même valeur de paramètre. L'objectif ici va être à partir d'une consigne de vitesse Vc :
De mesurer la vitesse des 2 moteurs
D'ajuster la commande en fonction de la différence entre la consigne et les mesures
On parle de régulation de vitesse. Le robot possède un encodeur par roue :
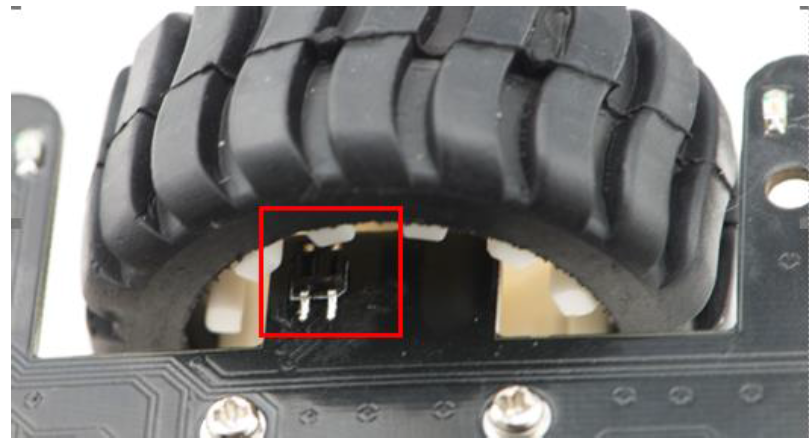
C'est la même technologie que pour le suiveur de ligne : une diode IR et un photo-transistor intégré dans le même boîtier.
Repérer sur le schéma ces deux détecteurs infrarouge.
Sur quel broche du micro-contrôleur sont relié les deux signaux ?
Représenter le schéma d'une cellule lorsqu'il n'y a pas d'IR recu :

Représenter le schéma d'une cellule lorsqu'il y a de l'IR reçu :
Si la roue tourne à une vitesse de 100 tr/min, représenter ci-dessous la tension V0(t).

Exprimer la relation entre T(en s) la période du signal et N( en tr/s) la vitesse de la roue sachant que lorsque la roue fait un tour le signal décrit 12 périodes.
Réaliser un programme qui affiche l'état des signaux reçu au terminal série.
Que constate-t-on lorsque l'on fait tourner les roues (attention à ne pas trop forcer) ?
Interruptions
Ainsi en mesurant la période du signal on pourra déterminer la vitesse de la roue. Pour cela on utilisera une interruption.
A l'aide d'une carte Arduino et du module groove suivre cette activité tirée du site de mon club elec.
Etude du moteur droit
Le programme suivant permet la mesure de la vitesse du moteur droit :
// Broches de control du moteur 1const int EN1 = 6; // Broche Marche/Arret Moteur
const int PWM1 = 7; // Broche control de la direction
// Broches de control du moteur 2const int EN2 = 5; // Broche Marche/Arret Moteur
const int PWM2 = 12; // Broche control de la direction
// Constante pour le pilotage const int AVANCER = 0; //go forward
const int RECULER = 1; //go back
// Broches encodeurs droit et gauche:const int ENCD = 0;
const int ENCG = 1;
volatile int count = 0;
long t0;
const int T = 500;
/* Fonction pilotage des moteurs :Moteur 1 : Droite M1_DIR : AVANCER/RECULERM1_EN : 1-255 (PWM) 0 -> STOPMoteur 2 : GaucheM2_DIR : AVANCER/RECULERM2_EN : 1-255 (PWM) 0 -> STOP*/void Motor_Control(int M1_DIR,int M1_EN,int M2_DIR,int M2_EN)//control motor
{ //////////M1////////////////////////if(M1_DIR==AVANCER)
digitalWrite(PWM1,AVANCER);
elsedigitalWrite(PWM1,RECULER);
if(M1_EN==0)
analogWrite(EN1,LOW);//stop
elseanalogWrite(EN1,M1_EN); //Vitesse
///////////M2//////////////////////if(M2_DIR==AVANCER)
digitalWrite(PWM2,AVANCER);
elsedigitalWrite(PWM2,RECULER);
if(M2_EN==0)
analogWrite(EN2,LOW);
elseanalogWrite(EN2,M2_EN);
}
void setup()
{pinMode(ENCD,INPUT);// Encoder droit
attachInterrupt(digitalPinToInterrupt(ENCD), incrementer_compteur, CHANGE);
Serial.begin(9600);
pinMode(EN1 ,OUTPUT); // Broches moteurs en sortie
pinMode(PWM1 ,OUTPUT);
pinMode(EN2 ,OUTPUT);
pinMode(PWM2 ,OUTPUT);
Motor_Control(AVANCER,80,AVANCER,0); // Moteur droit
t0 = millis();
}
void loop()
{if(millis() - t0 > T)
{Serial.print("count : ");
Serial.println(count);
Serial.print("vitesse :");
float vitesse = (60.0*1000.0*(float)count)/( 24.0 *(float)T);
Serial.print(vitesse);
Serial.println(" tr/min");
count = 0;
t0 = millis();
}
}
void incrementer_compteur() {
count ++;
}
Tester le programme ci-dessus pour différentes valeurs de vitesse (20 à 255)
Commande | 30 | 50 | 100 | 255 |
Vitesse |
On souhaite agir sur la commande pour réguler la vitesse de rotation du moteur droit selon une consigne $Vc$ donnée en tr/min.
Réaliser un algorigramme du programme de la régulation de vitesse du moteur droit à l'aide de Draw.io
Implémenter la solution.
Régulation 1 roue
// Broches de control du moteur 1const int EN1 = 6; // Broche Marche/Arret Moteur
const int PWM1 = 7; // Broche control de la direction
// Broches de control du moteur 2const int EN2 = 5; // Broche Marche/Arret Moteur
const int PWM2 = 12; // Broche control de la direction
// Constante pour le pilotage const int AVANCER = 0; //go forward
const int RECULER = 1; //go back
// Broches encodeurs droit et gauche:const int ENCD = 0;
const int ENCG = 1;
// Variables pour le calcul de la vitessevolatile int count = 0; // Nb impulsion
long t0;
const int T = 100; // Periode d'echantillonnage en ms
// Consigne vitesse :float Vc = 100.0; // Consigne de vitesse
float E = 0.0; // Erreur
float K = 0.1; // Correcteur proportionnel
int C = 127; // Commande vitesse
/* Fonction pilotage des moteurs :Moteur 1 : Droite M1_DIR : AVANCER/RECULERM1_EN : 1-255 (PWM) 0 -> STOPMoteur 2 : GaucheM2_DIR : AVANCER/RECULERM2_EN : 1-255 (PWM) 0 -> STOP*/void Motor_Control(int M1_DIR,int M1_EN,int M2_DIR,int M2_EN)//control motor
{ //////////M1////////////////////////if(M1_DIR==AVANCER)
digitalWrite(PWM1,AVANCER);
elsedigitalWrite(PWM1,RECULER);
if(M1_EN==0)
analogWrite(EN1,LOW);//stop
elseanalogWrite(EN1,M1_EN); //Vitesse
///////////M2//////////////////////if(M2_DIR==AVANCER)
digitalWrite(PWM2,AVANCER);
elsedigitalWrite(PWM2,RECULER);
if(M2_EN==0)
analogWrite(EN2,LOW);
elseanalogWrite(EN2,M2_EN);
}
void setup()
{pinMode(ENCD,INPUT);// Encoder droit
attachInterrupt(digitalPinToInterrupt(ENCD), incrementer_compteur, CHANGE);
Serial.begin(9600);
pinMode(EN1 ,OUTPUT); // Broches moteurs en sortie
pinMode(PWM1 ,OUTPUT);
pinMode(EN2 ,OUTPUT);
pinMode(PWM2 ,OUTPUT);
Motor_Control(AVANCER,0,AVANCER,0); // Moteur droit
t0 = millis();
}
void loop()
{if(millis() - t0 > T)
{float V = (60.0*1000.0*(float)count)/( 24.0 *(float)T); // Vitesse mesuree
E = (Vc - V); // Erreur
C = C + int(K * E);
if(C<0)
C = 0;
if(C > 255)
C = 255;
Motor_Control(AVANCER,C,AVANCER,0); // Moteur droit
// Serial.print("C : ");// Serial.println(C);// Serial.print("V :");// Serial.println(V);// Serial.print("Vc :");// Serial.println(Vc);Serial.println(V);
// Serial.println(" tr/min");count = 0;
t0 = millis();
}
}
void incrementer_compteur() {
count ++;
}
Régulation 2 roues
// Broches de control du moteur 1const int EN1 = 6; // Broche Marche/Arret Moteur
const int PWM1 = 7; // Broche control de la direction
// Broches de control du moteur 2const int EN2 = 5; // Broche Marche/Arret Moteur
const int PWM2 = 12; // Broche control de la direction
// Constante pour le pilotage const int AVANCER = 0; //go forward
const int RECULER = 1; //go back
// Broches encodeurs droit et gauche:const int ENCD = 0;
const int ENCG = 1;
// Variables pour le calcul de la vitessevolatile int countD = 0; // Nb impulsion
volatile int countG = 0; // Nb impulsion
long t0;
const int T = 100; // Periode d'echantillonnage en ms
// Consigne vitesse :float VDc = 150.0; // Consigne de vitesse
float ED = 0.0; // Erreur
int CD = 50; // Commande vitesse
float VGc = 150.0; // Consigne de vitesse
float EG = 0.0; // Erreur
int CG = 50; // Commande vitesse
float K = 0.1; // Correcteur proportionnel
/* Fonction pilotage des moteurs :Moteur 1 : Droite M1_DIR : AVANCER/RECULERM1_EN : 1-255 (PWM) 0 -> STOPMoteur 2 : GaucheM2_DIR : AVANCER/RECULERM2_EN : 1-255 (PWM) 0 -> STOP*/void Motor_Control(int M1_DIR,int M1_EN,int M2_DIR,int M2_EN)//control motor
{ //////////M1////////////////////////if(M1_DIR==AVANCER)
digitalWrite(PWM1,AVANCER);
elsedigitalWrite(PWM1,RECULER);
if(M1_EN==0)
analogWrite(EN1,LOW);//stop
elseanalogWrite(EN1,M1_EN); //Vitesse
///////////M2//////////////////////if(M2_DIR==AVANCER)
digitalWrite(PWM2,AVANCER);
elsedigitalWrite(PWM2,RECULER);
if(M2_EN==0)
analogWrite(EN2,LOW);
elseanalogWrite(EN2,M2_EN);
}
void setup()
{pinMode(ENCD,INPUT);// Encoder droit
attachInterrupt(digitalPinToInterrupt(ENCD), incrementer_compteurD, CHANGE);
attachInterrupt(digitalPinToInterrupt(ENCG), incrementer_compteurG, CHANGE);
Serial.begin(9600);
pinMode(EN1 ,OUTPUT); // Broches moteurs en sortie
pinMode(PWM1 ,OUTPUT);
pinMode(EN2 ,OUTPUT);
pinMode(PWM2 ,OUTPUT);
Motor_Control(AVANCER,0,AVANCER,0); // Moteur droit
t0 = millis();
}
void loop()
{if(millis() - t0 > T)
{float VD = (60.0*1000.0*(float)countD)/( 24.0 *(float)T); // Vitesse mesuree
ED = (VDc - VD); // Erreur
CD = CD + int(K * ED);
if(CD<0)
CD = 0;
if(CD > 255)
CD = 255;
//Motor_Control(AVANCER,CD,AVANCER,CG); // Moteur droitfloat VG = (60.0*1000.0*(float)countG)/( 24.0 *(float)T); // Vitesse mesuree
EG = (VGc - VG); // Erreur
CG = CG + int(K * EG);
if(CG<0)
CG = 0;
if(CG > 255)
CG = 255;
Motor_Control(AVANCER,CD,AVANCER,CG); // Moteur droit
Serial.print("CD : ");
Serial.println(CD);
Serial.print("VD :");
Serial.println(VD);
Serial.print("VDc :");
Serial.println(VDc);
Serial.print("CG : ");
Serial.println(CG);
Serial.print("VG :");
Serial.println(VG);
Serial.print("VGc :");
Serial.println(VGc); // Serial.println(VD);
// Serial.println(VG);// Serial.println(" tr/min");countD = 0;
countG = 0;
t0 = millis();
}
}
void incrementer_compteurG() {
countG++;
}
void incrementer_compteurD() {
countD++;
}