Détecteurs infrarouge du miniQ 2WD⚓
Analyse du détecteur
Le robot mini-Q est équipé de cinq couples leds/photo-transistors (infra-rouge) dirigés vers le bas. Ils sont destinés à mesurer la réflexion du support sur lequel roule le robot.
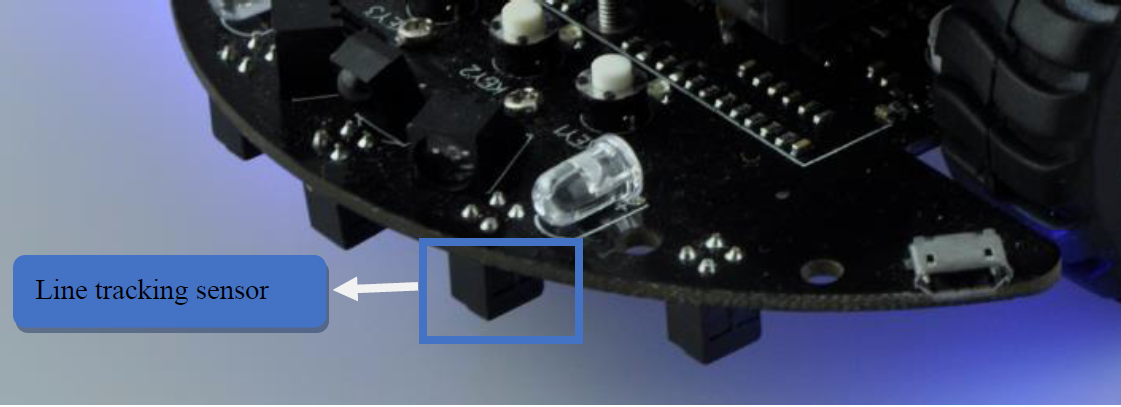
Sur le schéma structurel de la carte entourer la partie concernant les 5 détecteurs infrarouges.
Quel est la référence de ces détecteur ?
D'après la documentation technique la structure interne du capteur est la suivante :
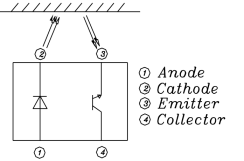
Reproduire ci-dessous le schéma d'une cellule :

Quel est l'état du photo-transistor lorsqu'il ne reçoit pas de lumière (Noir) ?
Même question lorsque la lumière infra-rouge est réfléchie (Blanc) ?
Rechercher dans la documentation technique son temps de monté et son temps de descente :
Si vous prenez un support blanc et que vous fixez un scotch noir vous arriverez à détecter le support noir qui n'a pas la même réflectance infra-rouge que le support blanc.
Les sensibilités des capteurs ne sont pas identiques, un calibrage de chacun des capteurs peut se faire par le programme simple :
int data[5]={0};// Valeur des 5 capeurs
void setup(){
Serial.begin(9600);
}
void Read_IRLine(void){ // Lecture des capteurs de ligne
data[0]=analogRead(A0); // gauche
data[1]=analogRead(A1);
data[2]=analogRead(A2); // milieu
data[3]=analogRead(A3);
data[4]=analogRead(A4); // droite
}
void loop(){
Read_IRLine();for (char i=0;i<5;i++){
Serial.print(data[i]);
Serial.print(" ");
}
Serial.println(" ");
delay(1000);
}
Remplir le tableau suivant :
Noir | Blanc | Seuil de détection | |
data[0] | |||
data[1] | |||
data[2] | |||
data[3] | |||
data[4] |
Suiveur de ligne.
Dans cette partie vous devez utiliser la fonction Motor_Control de l'activité précédente et la fonction Read_IRLine() ci dessous pour réaliser un programme permettant au robot de suivre une ligne :
Une première étape ci-dessous sans la partie commande moteur à tester :
/* Suiveur de ligne sans Commande moteur : La commande des moteurs est simulee par une sortie au terminal serie.*/ int data[5]={0};// Valeur des 5 capeurs
/* Les seuils calculés avec les valeurs de calibration prises sur la piste. */const int SEUIL0 = (290 + 986)/2;
const int SEUIL1 = (270 + 988)/2;
const int SEUIL2 = (384 + 988)/2;
const int SEUIL3 = (448 + 990)/2;
const int SEUIL4 = (388 + 990)/2;
void setup(){
Serial.begin(9600);
}
void Read_IRLine(void){ // Lecture des capteurs de ligne
data[0]=analogRead(A0); // gauche
data[1]=analogRead(A1);
data[2]=analogRead(A2); // milieu
data[3]=analogRead(A3);
data[4]=analogRead(A4); // droite
}
void loop(){
Read_IRLine();for (char i=0;i<5;i++){
Serial.print(data[i]);
Serial.print(" ");
}
Serial.println(" ");
if(data[1]< SEUIL1 && data[3] > SEUIL3)// SI ligne noir a gauche
{Serial.println("Tourner a gauche");
}
else if(data[1] > SEUIL1 && data[3] < SEUIL3) // SI ligne noir a droite
{Serial.println("Tourner a droite");
}
else if (data[1] > SEUIL1 && data[2] < SEUIL2 && data[3] > SEUIL3)
{Serial.println("Avancer ");
}
else {Serial.println("Doucement ..");
}
delay(1000);
}
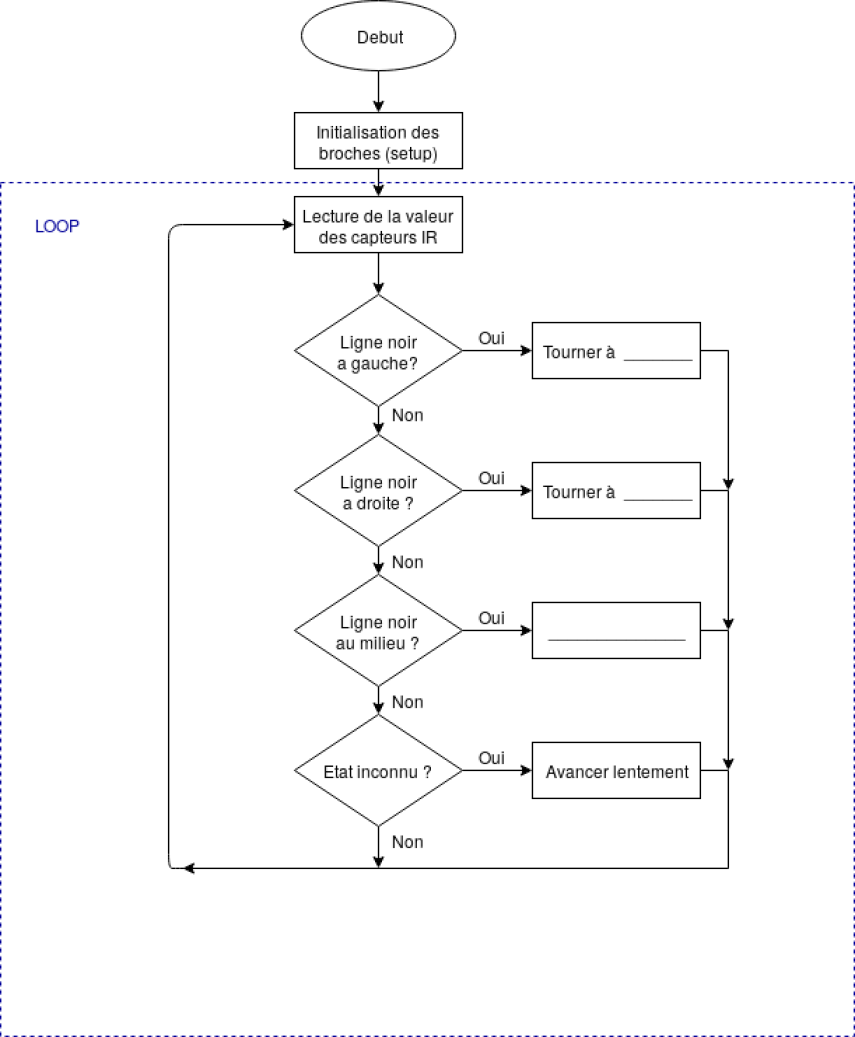
Réaliser la fusion entre la partie commande moteur et le programme ci-dessus afin de répondre à l'algorithme de suivi de ligne.