Servo moteur⚓
Introduction au Servomoteur
Les projets AerocatBT, Mini Dolly, utilisant tous un servomoteur les élèves en charge de leur programmation pourront faire des simulation sur TinkerCAD.
Commander juste un Servo
En s'aidant de la vidéo suivante et de la doc d'arduino
Sous TinkerCAD piloter votre servomoteur comme dans la première partie de la vidéo
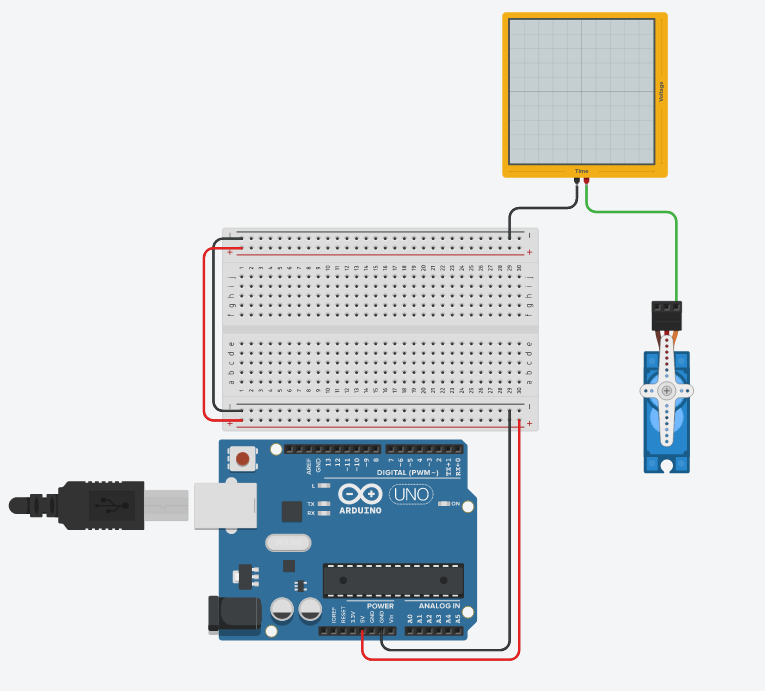
Bien paramétrer l'oscilloscope pour permettre de visualiser l'impulsion
Quelle est la durée de l'impulsion lorsque la position du servo est à 0 degré ?
Quelle est la durée de l'impulsion lorsque la position du servo est à 180 degré ?
Potentiomètre et servomoteur
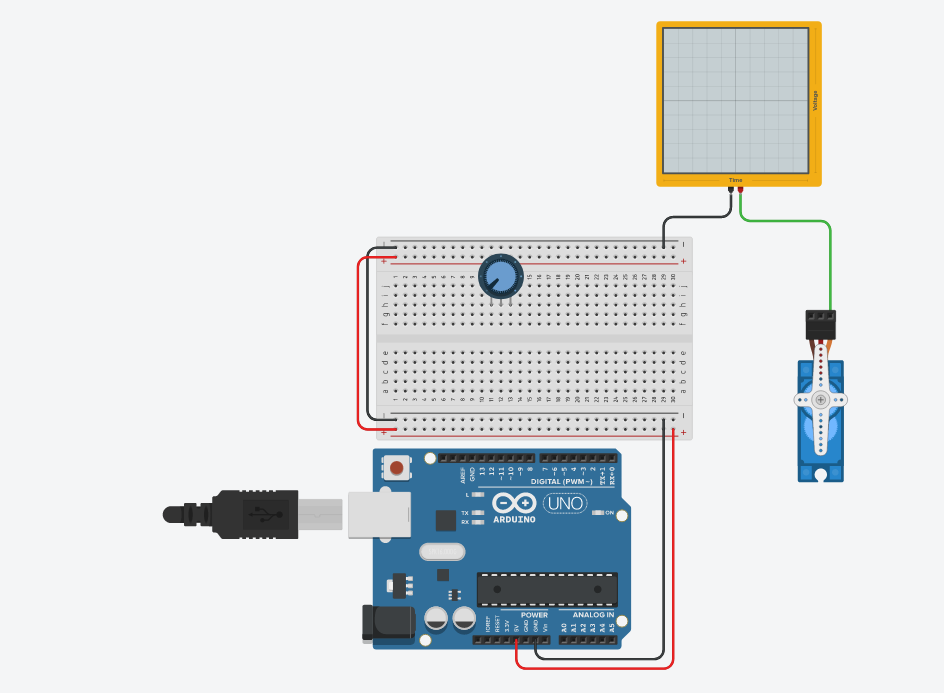
Sous TinkerCAD piloter votre servomoteur à l'aide d'un potentiomètre comme dans la deuxième partie de la vidéo
Pour piloter le moteur Brushless du projet, il est nécessaire de mettre la broche 3 à l'état bas pendant 5 secondes avant de commander sa vitesse.
Adapter le schéma et tester le programme suivant sous tinkerCAD :
Servo servo;
void setup() {
pinMode(3,OUTPUT); // _______________________________
digitalWrite(3,LOW); // _______________________________
delay(5000); // _______________________________
servo.attach(3); // _______________________________
Serial.begin(9600); // _______________________________
}
void loop() {
int val = analogRead(A0); // __________________________
val = map(val,0,1023,0,180); // __________________________
servo.write(val); // __________________________
Serial.println(val); // __________________________
delay(300); // __________________________
}
Commenter les lignes ci-dessus
Complément : Pour aller plus loin
Pour comprendre comment les servo-moteurs fonctionnent vous pourrez regarderez la vidéo d'Electrobidouilleur, très complète :